
Lecture 03. 变换(二维与三维)
缩放
缩放的数学形式表现:
x'=s*x+0*y y'=0*x+s*y
矩阵形式:

矩阵相乘的条件是:前一个矩阵的列数必须等于后一个矩阵的行数。在这种情况下
反转
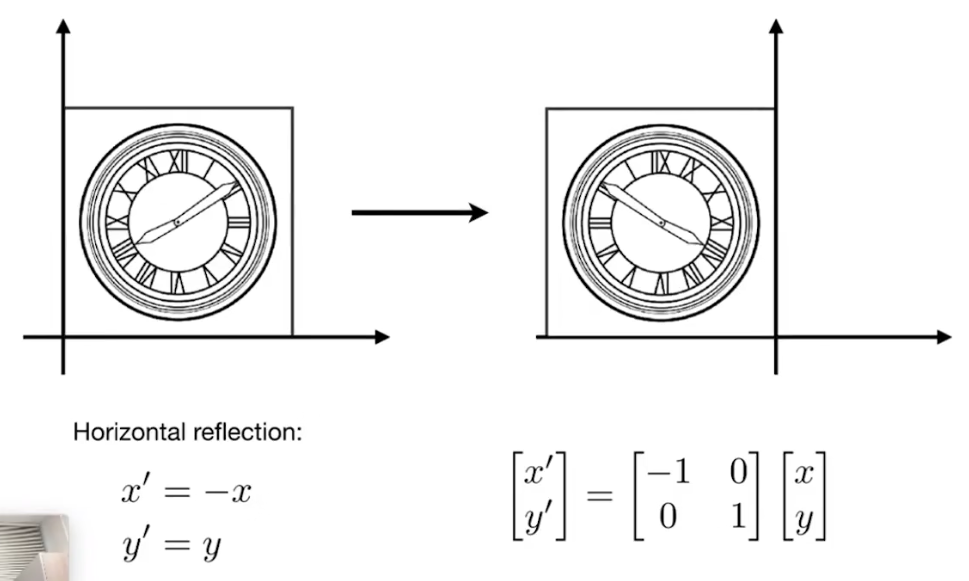
切变

旋转变换

推导过程:
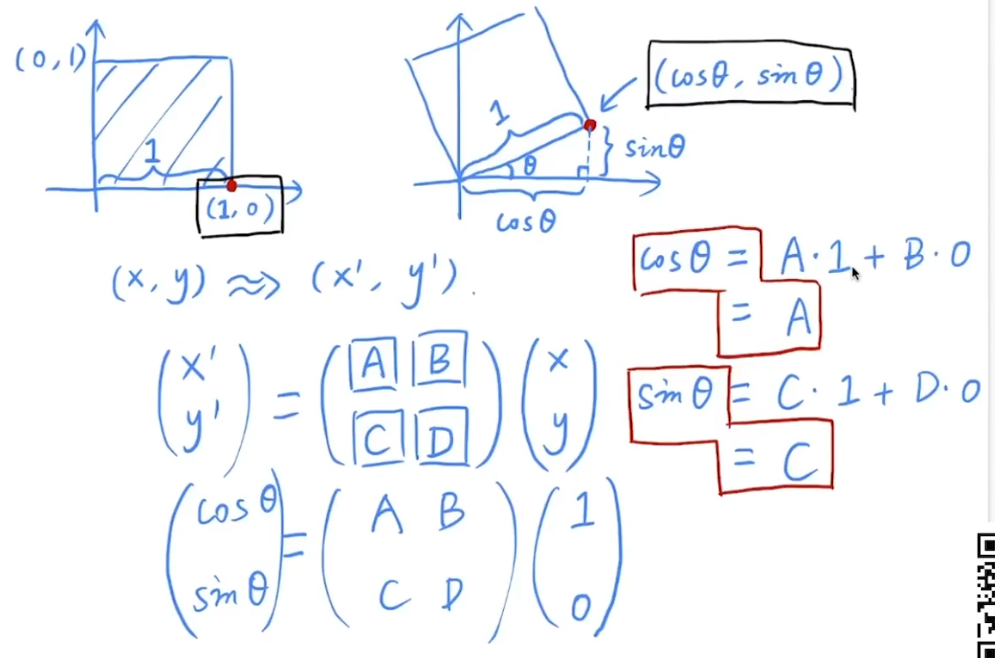
注意:旋转的中心永远是坐标轴的原点:
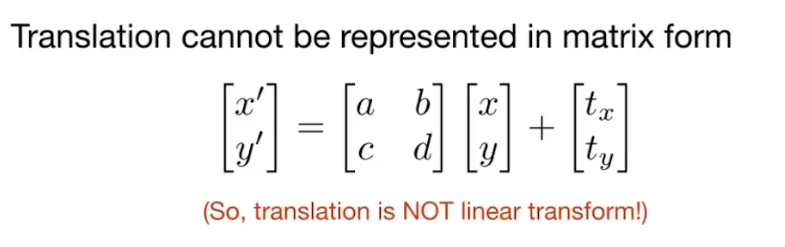
平移与齐次坐标
平移无法直接用矩阵相乘的形式来表达:

虽然我们可以通过矩阵相乘再相加的方式来表示(这种叫做仿射变换)平移,但这也就意为这这个变化不是线性变化了:
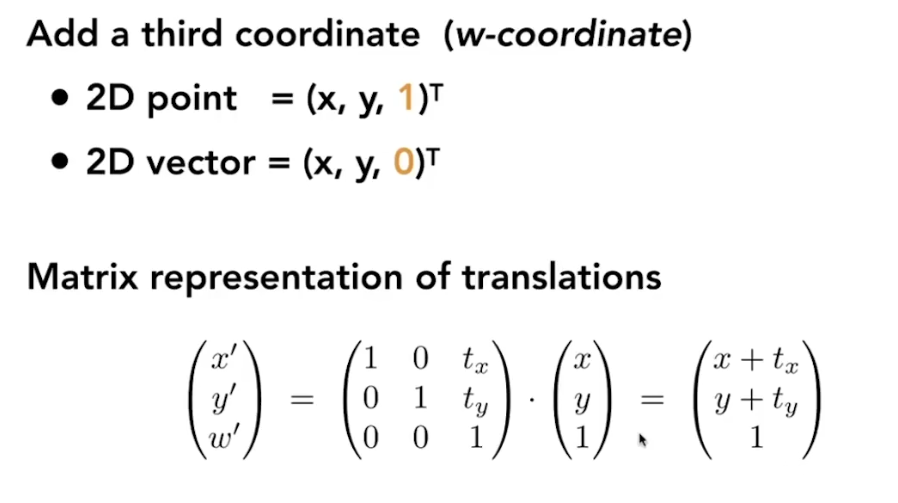
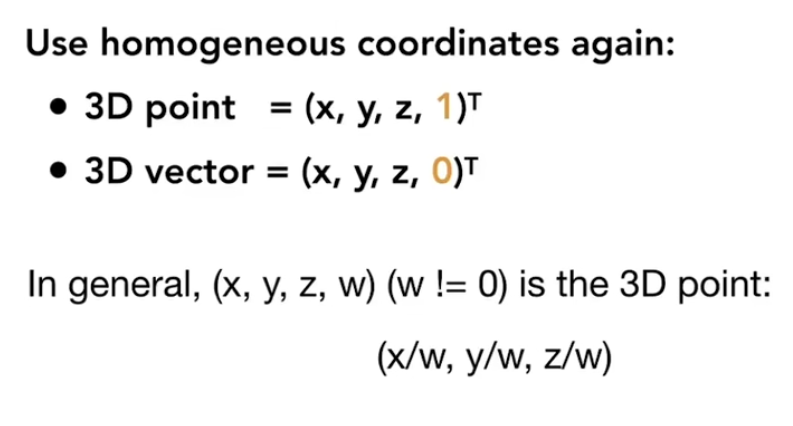
齐次坐标通过增加一个纬度的方式来解决了这个问题:
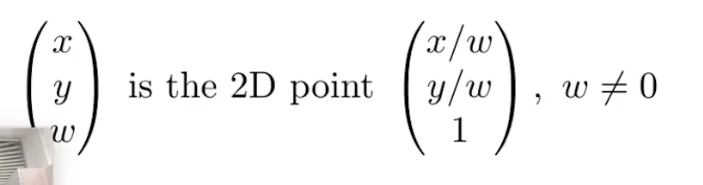
三维坐标中的点可以映射在二维坐标中:
仿射变换转为齐次坐标的方式,tx、ty 代表平移 :

二维的变换都可以改写为齐次坐标,他们的意义是不会因为增加了一个纬度而改变的:

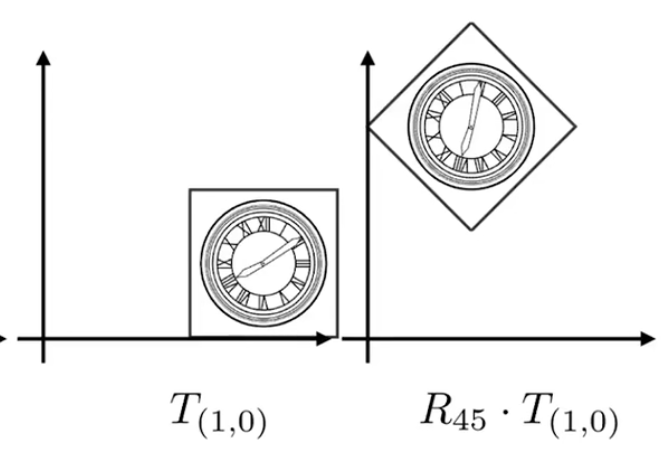
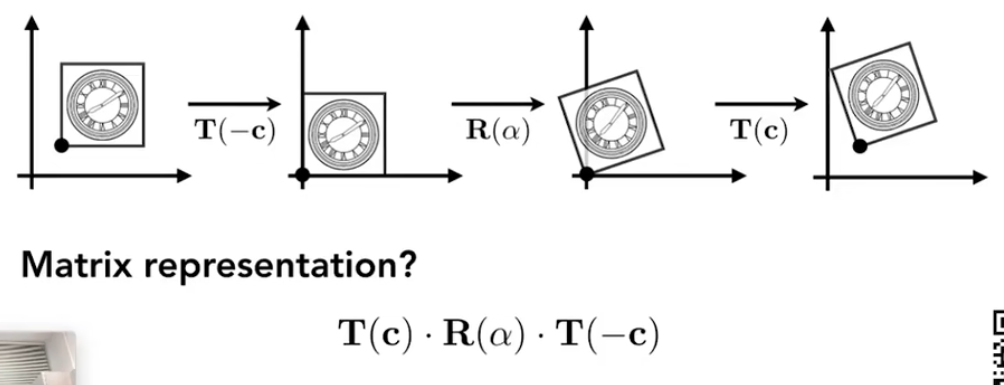
复杂变换
使用矩阵相乘可以进行复杂的图形变换,但是相乘的顺序很重要:
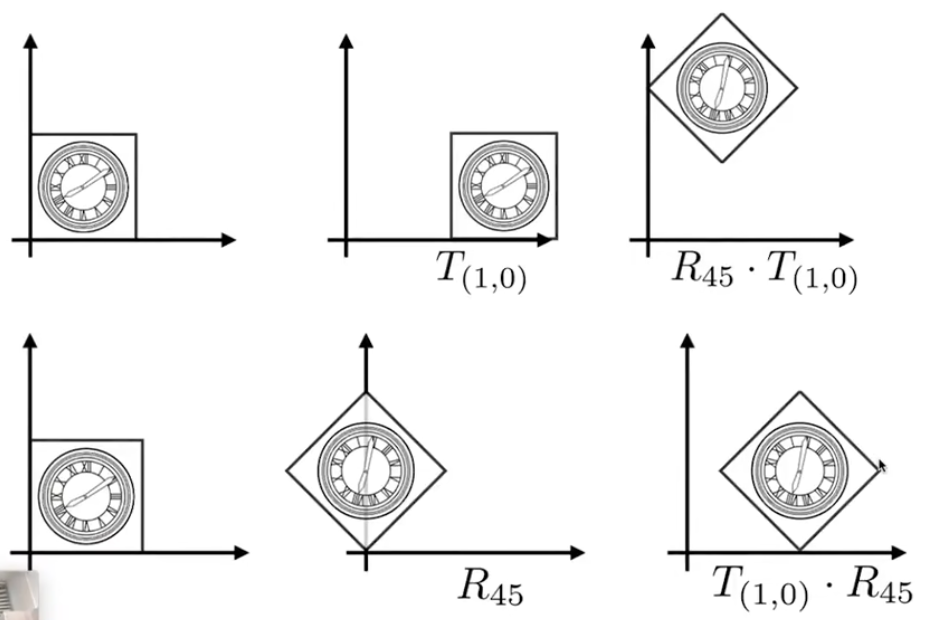
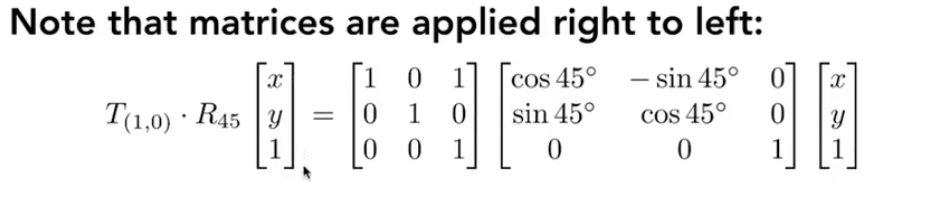
形变顺序在矩阵相乘公式中是从左到右运算的,因此先旋转后平移的矩阵表达式为:
再举一个例子,如果想要改变图形的旋转中心,就可以先将其移动到原点,进行旋转后,再将其移动到原来的位置:
三维空间中的形变
相同的,在三维空间中如果发生了平移操作,也要转化为齐次坐标进行描述:
三维空间中使用齐次坐标描述仿射变换:
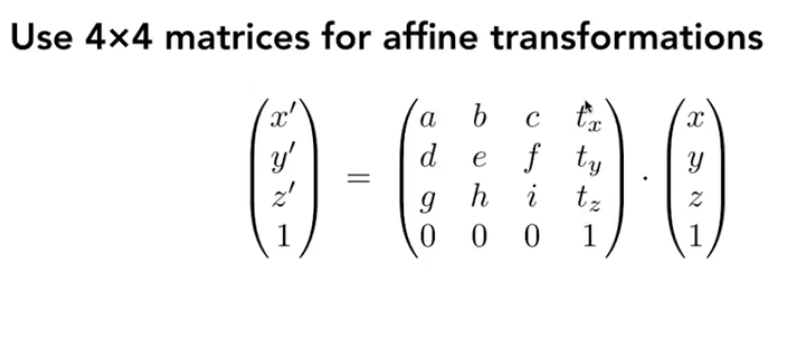
上面的公式描述为先进行线性变换,再平移
补充:旋转矩阵的逆操作
对于旋转操作来说,如果想要旋转负的 θ 角(也就是逆操作),则要将 sinθ 进行取反,取反后的矩阵就正好是原矩阵的转置矩阵。
因此,我们可以说:在旋转里面,它的逆就等于旋转矩阵的转置:

在数学上,如果一个矩阵的逆等于它的转置,这个矩阵叫做正交矩阵。
Lecture 04. 变换(模型、视图、投影)
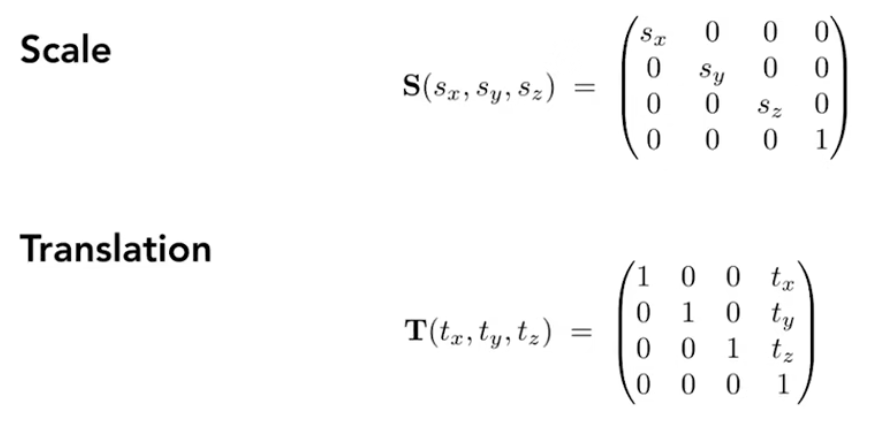
三维形变 —— 缩放与平移
三维形变 —— 旋转
三维旋转比较复杂,我们可以拆分为单独绕某个轴进行旋转:
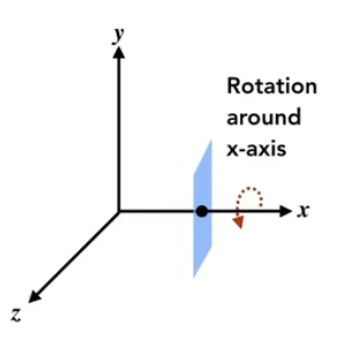
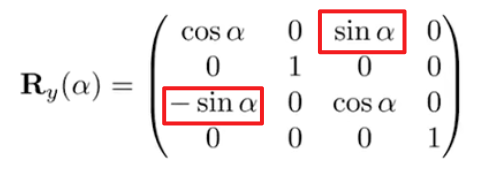
绕 x 轴旋转相当于 x 轴的坐标不变,所以与 x 相乘的第一行为 [1 0 0 0]:
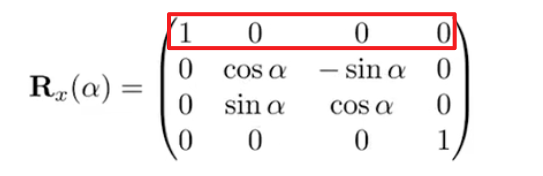
相同的,绕 z 轴旋转就是 z 轴坐标对应相乘的矩阵行就是 [0 0 1 0]:

绕 y 轴旋转需要注意,sinα 的取值是负的,这是因为 xyz 的顺序决定的:
任意的三维旋转都可以写成绕 x 轴、绕 z 轴、绕 y 轴的旋转的组合:

三个轴的旋转量分别是 α、β、γ,数学上将其称之为欧拉角。
三个轴的旋转行为分别被称为 roll、yaw、pitch:

使用罗德里格斯旋转公式可以直接求得在三维空间里的向量绕着某个轴 n 旋转 α 角度后得到的最终向量,而不必将旋转进行 x、y、z 轴上的拆分:

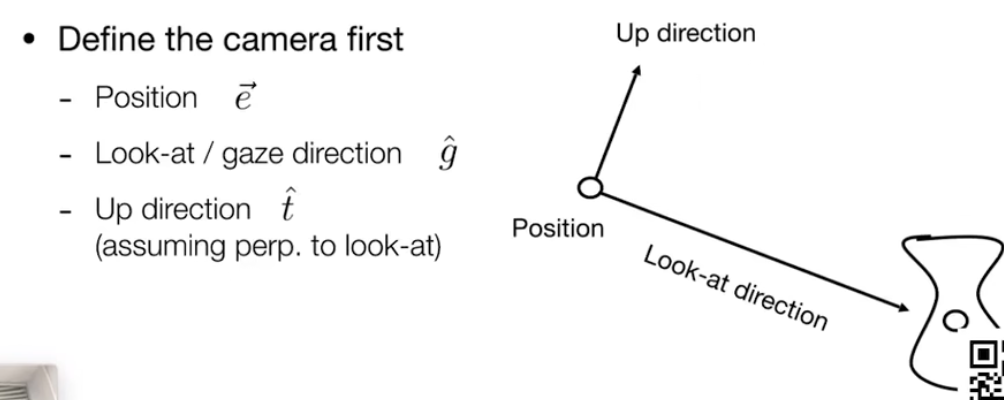
视图/相机变换
首先要定义相机的相关向量:
- 相机的位置使用向量 e;
- 相机的朝向使用向量 h;
- 由于相机自身可能有旋转角度,因此我们使用一个“向上向量” t 来表示相机的自身旋转状态;
由于相机和被摄物体之间共同发生了旋转就相当于没有发生旋转,因此我们规定相机始终在世界原点,并且相机的初始朝向朝着 Z 轴的负方向(这是为了操作方便而规定的):
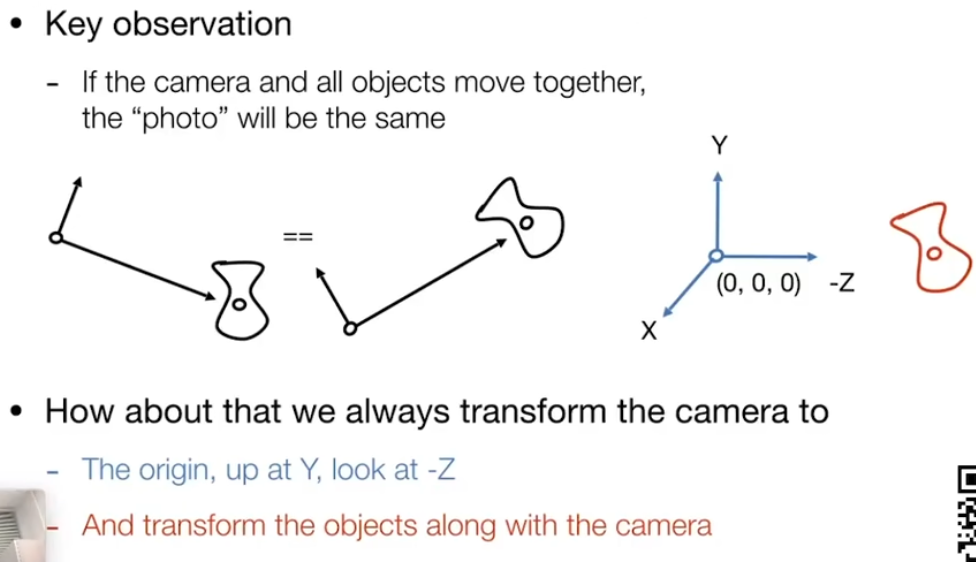
将相机的向量规范为世界坐标的过程:
- 将向量 e 放置到世界坐标的原点;
- 旋转向量 g 对其到坐标轴的 z 轴;
- 旋转向量 t 对其到坐标轴的 y 轴;
- 旋转后向量 g x t 的结果就是 z 轴喽;
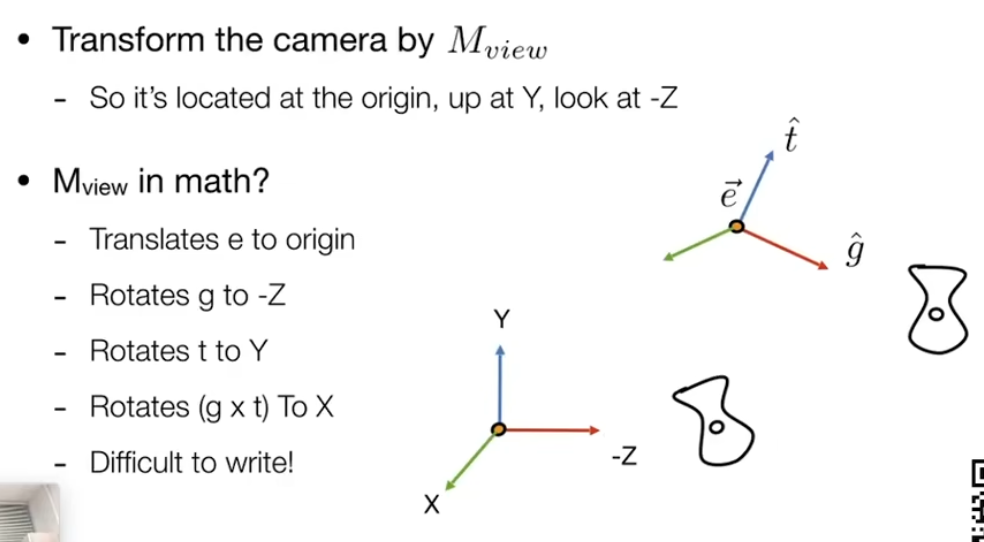
具体过程如下:

这里需要注意一下,由于将任意的轴旋转到一个规范化的轴上(向量 g 旋转到 -Z,向量 t 旋转到 Y, g x t 旋转到 X)的这一过程很不好描述,但是将规范化的轴(这个轴可以使用向量来表示,比如 (1,0,0) 表示 X 轴)旋转到某一向量上是比较好描述的,因此我们可以先求出后者。有因为旋转矩阵是一个正交矩阵,它的转置矩阵即是它的逆矩阵,这样我们就可以得到任意旋转轴到规范化轴上的旋转矩阵了。
正交相机拍摄的物体投影在显示设备上
正交投影和透视投影如下:


正交投影的点线都是平行的,大多被用于工程视图,但是我们正常视角下都应该是透视投影。
对于正交投影来说,丢弃 Z 轴即可得到投影的结果:
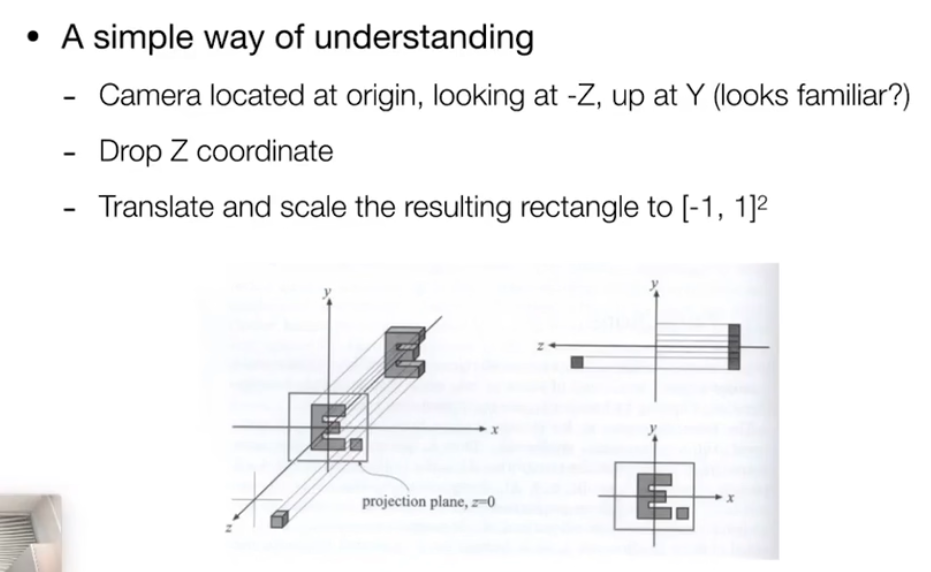
不管 x、y 的范围有多大,都将其归一化到 [-1, 1] 的取值范围内,这是约定俗成的,为了方便后续的计算。为了实现归一化,空间中的物体也要做相对应的缩放,其过程为先将物体移到原点,然后对物体缩放到 [-1, 1] 之间:

在为了归一化而缩放过程中,可能会导致原有的物体被拉伸,如把原本的一个长方体空间拉伸成一个 1:1 的立方体,那么空间里的物体也会被响应的拉伸,最后完成时还要进行视口的还原。
数学表达如下:

透视相机拍摄的物体投影在显示设备上
在进行前,我们先回忆一下齐次坐标的性质,在齐次坐标中,(x, y, z, 1) 和 (kx, ky, kz, k != 0) 都表示同一个点,那么 (xz, yz, z², z != 0) 这个齐次坐标在三维空间中同样能表示 (x, y, z)。

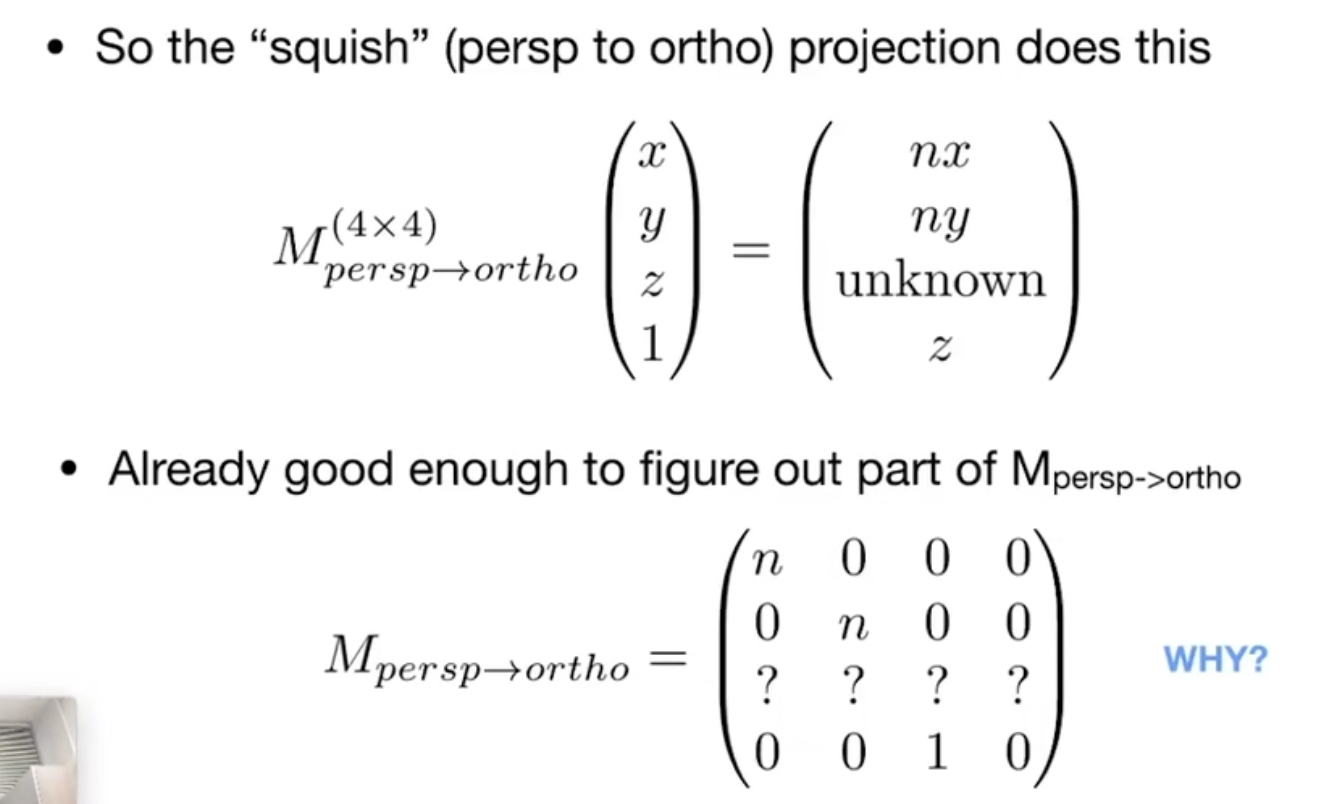
我们前面已经知道了如何求正交相机的投影,那么对于透视相机来说,我们只要将透视相机的空间压缩为正交相机的空间,那么后续的过程都一样了:

根据相似三角形定理,远平面上的点映射到近平面上的点的坐标,就等于相机距离近平面的距离、与相机距离远平面的距离的比值,与原坐标相乘:

坐标点用齐次坐标表示后,可以通过上面得到的公式,得到一个透视空间被压缩为正交空间后的新的坐标,我们可以得到新的坐标的 x 和 y 值,但是无法得到转化后的 z 值。
为什么 z 是 unknown ?
- 挤压之后原本在Z方向上均匀分布的点将变得不均匀,疏密程度会发生变化
- 各位看清楚,这个相似三角形并不平行于yoz所在平面,n,z分别代表原点到对应点的距离而不是z值!这个相似三角形和z值完全没有关系自然得不到z值!!!
我们可以先将齐次坐标乘以 z,得到一个比较好处理的齐次坐标:

根据结果,我们可以反推出来将透视空间转为正交空间的投影矩阵:
为了求出矩阵的第三行,我们需要利用这个变换过程中的特性:
- 任何近平面的点进过转换后,z 轴坐标不会发生改变;
- 任何远平面的点经过转换后,z 轴的坐标同样不会发生改变;
那么我们就可以取近平面上的某一点 (x, y, n),它的其次坐标为 (x, y, n, 1),经过变换后的点仍为 (x, y, n, 1),利用齐次坐标的特性,将其所有项都乘以 n 后得到 (nx, ny, n², n):
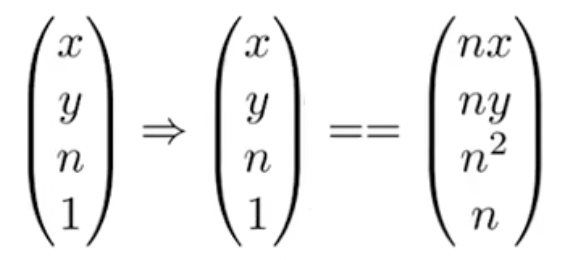
那么我们就可以得到:
M x (x, y, z, 1) = (nx, ny, n², n)
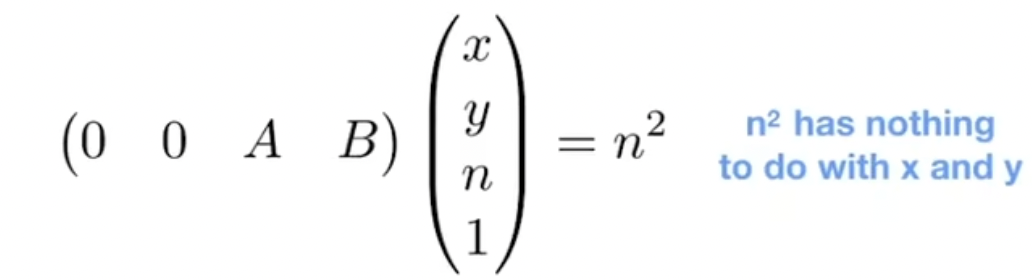
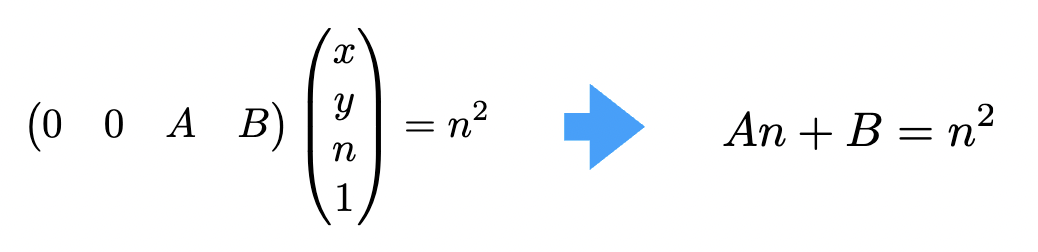
进一步我们就可以假设我们要求的矩阵第三行为 [0 0 A B](n² 与 xy 没有关系,所以与 xy 相乘的数必定是 0):
进一步计算后得到计算公式:
但是具体的 A、B 是什么我们还未知,可能是 (n, 0) 也可能是 (0, n²)。此时我们还要利用另外一个特性,那就是远平面中心的点在经过转换后,z 轴坐标是不变的,假设这个点是 (0, 0, f),那么转化为其次坐标后,我们就可以得到公式:

最终得出结果:
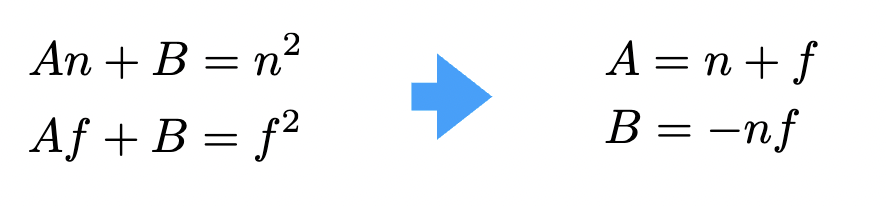
f 代表近平面的中心点到远平面的中心点之间的距离。